





視覚に頼らず素早く動く、「触覚」で判断するMITのロボットがすごい
YouTube/Massachusetts Institute of Technology (MIT)
アメリカのマサチューセッツ工科大学が開発した、新しい仕組みのロボットの動画が公開され、注目を集めている。
障害物のある階段も登れる
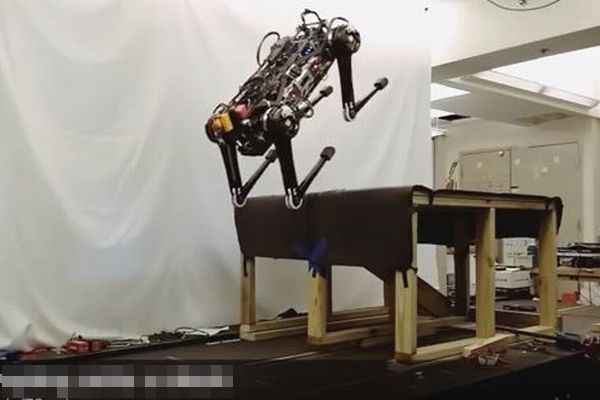
そのロボットとは「チーター3(Cheetah 3)」。重さ90ポンド(約40kg)で、ちょうどラブラドールの成犬くらいの大きさの、4足歩行のロボットだ。
これを開発したMITの研究者らは7月5日に、「チーター3」の動画を公開。そこには高速で走ったり、高い場所へジャンプしたり、さらに障害物のある階段を上ったりする様子が映っている。
また研究者がロボットを小突いたりして、予想外の力を加えても、すぐに姿勢を立て直し、再び同じ動作を行う様子も紹介されていた。
カメラやセンサーに頼らない方法を導入
しかしこのロボットの驚くべきところは、カメラが付いているものの、カメラや外部センサーなどに頼らず、触覚によって判断していること。
つまり新しい「接触検出アルゴリズム」を使い、周囲を「感じ」て、素早く動くという。
このため漆黒の闇のような部屋の中でも動ける、「ブラインド・ロコモーション(盲目で運動すること)」も可能だとされている。
MIT機械工学科の准教授であるSangbae Kim氏は、リリースにおいて次のように語っている。
「視覚に頼らず、ロボットが対処できなければならない、多くの予期せぬ出来事があります。視覚は煩わしく、やや不正確で、時にはそれらを利用できない場合もあります。もし視覚に頼りすぎると、ロボットは自らの位置や姿勢を非常に正確に把握しなければならず、結果的に遅くなってしまうでしょう」
「だから私たちは触覚の情報に頼ったロボットが欲しいと思ったのです。この方法により、ロボットは予期せぬ障害物に対しても、より速い動きで対処できるのです」

「チーター3」は障害物や階段がある発電所などの調査ができるようデザインされており、あまりにも危険すぎて人間が近づけない場所でも、さまざまな仕事をこなすために作られたという。
触覚から判断することで早く動けるとは画期的なロボットだが、さらに開発が進むことを期待したい。(了)
出典元:MIT News:“Blind” Cheetah 3 robot can climb stairs littered with obstacles(7/4)
 2018年7月10日ダンス動画を投稿していた18歳のイラン人女性、突然警察に拘束される
2018年7月10日ダンス動画を投稿していた18歳のイラン人女性、突然警察に拘束される 2018年7月11日サーカスで仲間に押されたゾウが観客席に倒れ込む、その動画が恐ろしい
2018年7月11日サーカスで仲間に押されたゾウが観客席に倒れ込む、その動画が恐ろしい

















